
This AI enables self-driving cars to "remember" previous journeys in order to determine safer routes.
A recollection from the past could enhance the safety of self-driving cars on the roads.
One major issue with self-driving systems is their ability to clearly see the road yet still make uncertain short-term decisions in chaotic urban traffic. These advanced systems often struggle to adapt to intricate and changing road conditions. However, a new study suggests that these vehicles require improved memory rather than enhanced vision.
The peer-reviewed paper titled KEPT (Knowledge-Enhanced Prediction of Trajectories from Consecutive Driving Frames with Vision-Language Models) describes a system developed by researchers from Tongji University and their collaborators. This system aids autonomous vehicles in “remembering” previous driving scenarios before deciding on next actions.
How does this innovative self-driving technology function?
The KEPT method utilizes videos from front-view cameras, comparing them with a vast archive of past real-world driving clips. It then predicts a safer short-term trajectory by considering the current scene alongside retrieved past examples. The main concept is straightforward; instead of instructing an AI model to respond to every scenario as though it has never encountered anything similar, KEPT allows it to recall past comparable experiences.
These examples are then incorporated into a vision-language model as part of a structured reasoning approach. This is crucial since researchers note that large vision-language models can otherwise fabricate information, overlook physical limitations, or suggest motions that seem feasible theoretically but are impractical for an actual vehicle. Consequently, KEPT functions like safety barriers to ensure the model is rooted in how similar traffic conditions have appeared in reality.
Is it more effective than traditional autonomous systems?
The researchers evaluated KEPT using the well-known nuScenes benchmark and claimed it surpassed both traditional end-to-end planning systems and newer vision-language-based planners regarding open-loop metrics. It notably reduced prediction errors and decreased potential collision indicators while maintaining retrieval speed that remains practical for real-time driving.
While it might appear to be an obvious choice for future self-driving cars, it is not yet fully prepared for the roads. Nevertheless, the overarching concept is intriguing. If autonomous vehicles can merge real-time perception with a significant memory of how similar situations have occurred in the past, they could potentially make decisions that seem less rigid and more akin to human reasoning.




Other articles
 OpenAI introduces GPT-Rosalind, an AI model designed for research in life sciences.
OpenAI has introduced GPT-Rosalind, its inaugural AI model focused on life sciences, aimed at drug discovery and genomics. The model is named in honor of Rosalind Franklin.
OpenAI introduces GPT-Rosalind, an AI model designed for research in life sciences.
OpenAI has introduced GPT-Rosalind, its inaugural AI model focused on life sciences, aimed at drug discovery and genomics. The model is named in honor of Rosalind Franklin.
 Ericsson falls just short of Q1 profit expectations due to a decline in North America.
In Q1 2026, Ericsson's adjusted EBITA declined by 20% to SEK 5.6 billion due to a downturn in North America and increased semiconductor expenses. CEO Ekholm points to the demand for AI impacting chip availability.
Ericsson falls just short of Q1 profit expectations due to a decline in North America.
In Q1 2026, Ericsson's adjusted EBITA declined by 20% to SEK 5.6 billion due to a downturn in North America and increased semiconductor expenses. CEO Ekholm points to the demand for AI impacting chip availability.
 OpenAI introduces GPT-Rosalind, an AI model designed for research in life sciences.
OpenAI has introduced GPT-Rosalind, its inaugural AI model focused on life sciences, aimed at drug discovery and genomics. It is named in honor of Rosalind Franklin.
OpenAI introduces GPT-Rosalind, an AI model designed for research in life sciences.
OpenAI has introduced GPT-Rosalind, its inaugural AI model focused on life sciences, aimed at drug discovery and genomics. It is named in honor of Rosalind Franklin.
 The Intel Core Series 3 processors have arrived, offering greater performance at a reduced cost.
Intel's latest Core Series 3 processors are designed for budget-friendly laptops, yet they still feature hybrid architecture, AI-capable performance, Wi-Fi 7, and unexpectedly modern specifications.
The Intel Core Series 3 processors have arrived, offering greater performance at a reduced cost.
Intel's latest Core Series 3 processors are designed for budget-friendly laptops, yet they still feature hybrid architecture, AI-capable performance, Wi-Fi 7, and unexpectedly modern specifications.
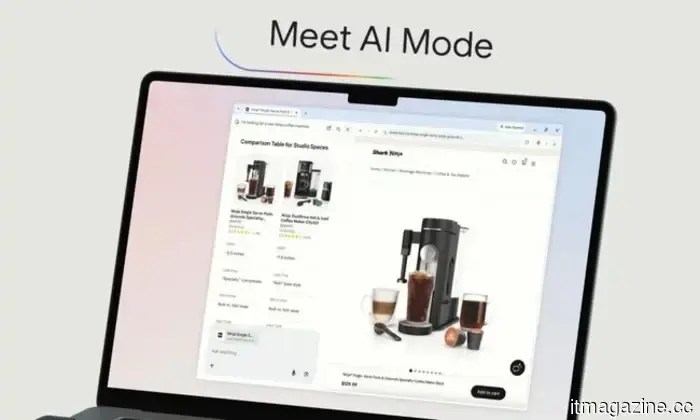
 The AI mode in Chrome receives a significant enhancement aimed at reducing the need for switching between tabs.
Google's AI Mode enhancement for Chrome enables you to browse websites and conduct searches simultaneously, allowing you to pose follow-up questions without losing your spot or opening an additional tab.
The AI mode in Chrome receives a significant enhancement aimed at reducing the need for switching between tabs.
Google's AI Mode enhancement for Chrome enables you to browse websites and conduct searches simultaneously, allowing you to pose follow-up questions without losing your spot or opening an additional tab.
 Intel unveils the key technology that helps gaming laptops operate more quietly and remain cooler.
Intel's AI Quiet Plus isn't simply a new processor or a software update; it's a certification standard that leverages on-chip AI to actively control noise, heat, and battery longevity.
Intel unveils the key technology that helps gaming laptops operate more quietly and remain cooler.
Intel's AI Quiet Plus isn't simply a new processor or a software update; it's a certification standard that leverages on-chip AI to actively control noise, heat, and battery longevity.
This AI enables self-driving cars to "remember" previous journeys in order to determine safer routes.
A new planning approach named KEPT enables self-driving vehicles to compare their current observations with similar past traffic scenarios, which helps reduce prediction errors and minimizes the likelihood of collisions.