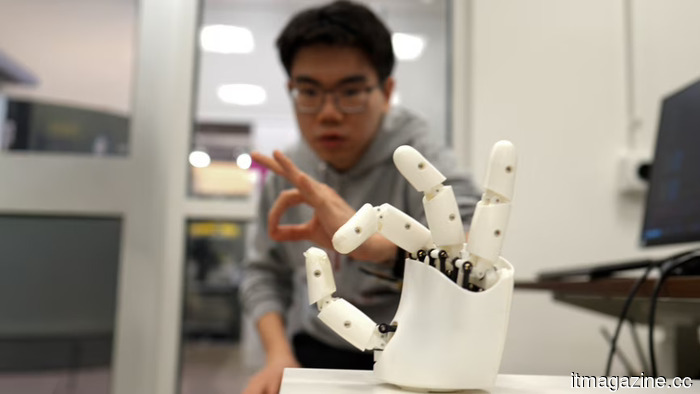
MIT's ultrasound wristband monitors all finger movements, enabling real-time control of a robotic hand.
TL;DRMIT has developed an ultrasound wristband capable of tracking 22 degrees of hand motion and controlling a robotic hand in real time with a latency of 120 milliseconds. Engineers at MIT have created a wristband that utilizes ultrasound technology to monitor the movement of tendons and muscles in the forearm, allowing it to track hand movements with high precision. This innovation, reported in Nature Electronics in March 2026, translates subtle movements into accurate data on finger and thumb position. In trials with eight participants, the system demonstrated continuous tracking with a latency of around 120 milliseconds, enabling the robotic hand to mimic human motions almost naturally.
The study was spearheaded by Xuanhe Zhao, a mechanical engineering professor at MIT, alongside co-authors including Gengxi Lu, Xiaoyu Chen, Shucong Li, Bolei Deng, SeongHyeon Kim, Dian Li, Shu Wang, Runze Li, and Anantha Chandrakasan, the dean of engineering at MIT. The wristband's accuracy was tested as participants performed the full American Sign Language alphabet, successfully identifying all 26 letters. The device functions wirelessly and does not rely on cameras or sensors attached to fingers.
Unlike conventional hand-tracking systems that depend on cameras or gloves—both of which have limitations—the MIT device reads the body's mechanics externally. As a finger moves, the associated tendons and muscles in the forearm shift in recognizable patterns. The ultrasound transducers capture these movements, and a machine learning model relates them to the 22 degrees of freedom that denote hand posture, covering joint angles for all fingers and the thumb.
The significance of the 120-millisecond latency is that it aligns with human perception of responsiveness in manual tasks. Participants were able to control a robotic hand through the wristband to perform tasks like grasping and manipulation. The robotic hand's movements closely mirrored those of the operator, making it suitable for teleoperation scenarios where remote control of robots is necessary in hazardous or sterile environments.
This development has broader implications beyond research, as dexterous hand control is a significant challenge in humanoid robotics. A wristband that enables real-time human control of a robotic hand could bridge the gap in allowing robots to perform complex tasks under human supervision while research into autonomous capabilities continues.
Funding for the research came from the National Institutes of Health, the National Science Foundation, the Department of Defense, and the Singapore National Research Foundation, indicating shared interest from medical and defense sectors, particularly in applications such as surgery and bomb disposal. The study does not introduce a commercial product or startup and instead presents a research prototype.
It's important to note that the findings were published in March 2026, roughly three months prior to this media coverage, and that the AP story discussing the research is a delayed feature. As major companies like Nvidia and Hyundai work towards integrating humanoid robots into various industries, the MIT wristband highlights a potential new way for humans to interact with these machines, not through traditional interfaces but by harnessing the operator's own hand.
The transition from lab research to a marketable product depends on challenges not covered in the paper, such as manufacturing costs and durability, as well as the scalability of the machine learning model across diverse hand anatomies without requiring individual calibration. The study with eight volunteers serves as proof of concept rather than a clinical trial, yet it represents a significant advance toward making teleoperation feasible beyond specialized settings.
Other articles
 Sony's 135-inch Crystal LED UNIFY is a boardroom display that can be set up in just one hour.
Sony has introduced the Crystal LED UNIFY, a 135-inch dvLED screen designed for boardrooms that can be set up by two individuals in just one hour. It is scheduled for release in early 2027.
Sony's 135-inch Crystal LED UNIFY is a boardroom display that can be set up in just one hour.
Sony has introduced the Crystal LED UNIFY, a 135-inch dvLED screen designed for boardrooms that can be set up by two individuals in just one hour. It is scheduled for release in early 2027.
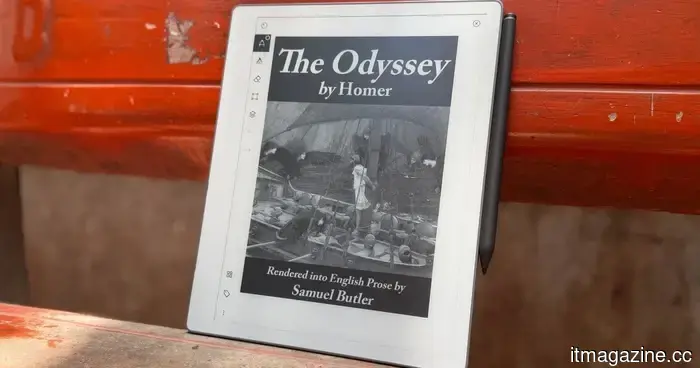 reMarkable Paper Pure review: A fantastic digital writing surface that I adore, yet also find frustrating.
The reMarkable Paper Pure provides the finest digital canvas for note-taking that I've encountered recently. However, this impressive device is limited by a constraining software experience.
reMarkable Paper Pure review: A fantastic digital writing surface that I adore, yet also find frustrating.
The reMarkable Paper Pure provides the finest digital canvas for note-taking that I've encountered recently. However, this impressive device is limited by a constraining software experience.
 Both Apple and Google aim to track the web on your behalf.
In close succession, Google and Apple revealed features that monitor web pages and notify users when changes occur. Searching is evolving into a continuous process rather than a one-off inquiry.
Both Apple and Google aim to track the web on your behalf.
In close succession, Google and Apple revealed features that monitor web pages and notify users when changes occur. Searching is evolving into a continuous process rather than a one-off inquiry.
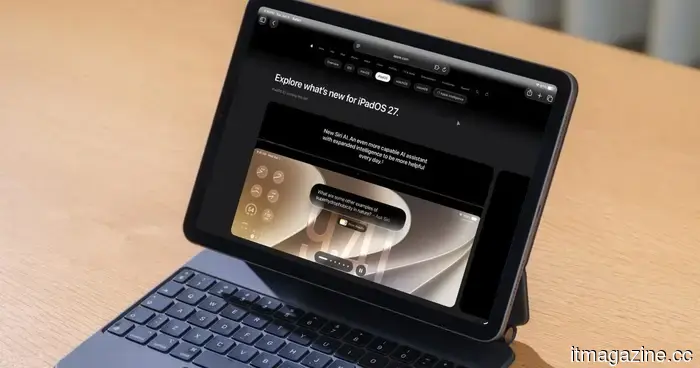 iPadOS 27: All the details about the new features coming to your iPad.
iPadOS 27 will be released this fall, featuring a brand-new Siri AI, enhanced photo tools, simplified Shortcuts, and a more organized Safari. Here’s all the information we have so far regarding the upcoming updates for your iPad.
iPadOS 27: All the details about the new features coming to your iPad.
iPadOS 27 will be released this fall, featuring a brand-new Siri AI, enhanced photo tools, simplified Shortcuts, and a more organized Safari. Here’s all the information we have so far regarding the upcoming updates for your iPad.
 Sony's 135-inch Crystal LED UNIFY is a display designed for boardrooms that can be set up in just one hour.
Sony introduced the Crystal LED UNIFY, a 135-inch dvLED screen designed for boardrooms that can be installed by two individuals within an hour. It is scheduled for release in early 2027.
Sony's 135-inch Crystal LED UNIFY is a display designed for boardrooms that can be set up in just one hour.
Sony introduced the Crystal LED UNIFY, a 135-inch dvLED screen designed for boardrooms that can be installed by two individuals within an hour. It is scheduled for release in early 2027.
 Anthropic has launched Claude Fable 5, marking its first Mythos-class model available to the public.
On Tuesday, Anthropic introduced Claude Fable 5, a model of the Mythos class that includes safeguards preventing inquiries related to cybersecurity and biology, with a cost of $10 for every million input tokens.
Anthropic has launched Claude Fable 5, marking its first Mythos-class model available to the public.
On Tuesday, Anthropic introduced Claude Fable 5, a model of the Mythos class that includes safeguards preventing inquiries related to cybersecurity and biology, with a cost of $10 for every million input tokens.
MIT's ultrasound wristband monitors all finger movements, enabling real-time control of a robotic hand.
Engineers at MIT have developed an ultrasound wristband that monitors 22 degrees of freedom in the hand with a latency of 120 milliseconds, allowing for real-time control of robotic hands and sign language.