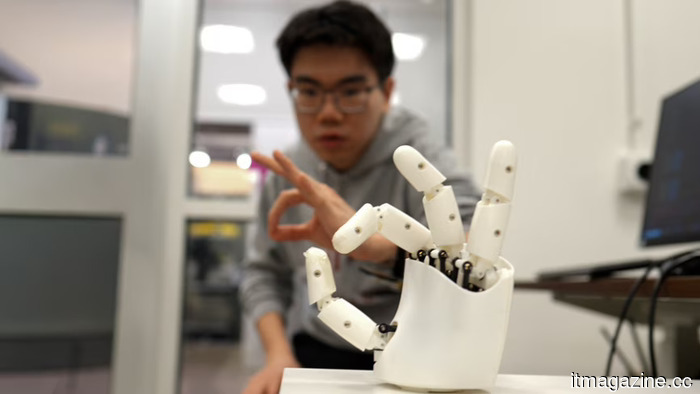
The ultrasound wristband developed by MIT monitors the movements of each finger and enables real-time control of a robotic hand.
MIT has developed an ultrasound wristband capable of tracking 22 degrees of hand movement and utilizing that information to control a robotic hand in real-time with a latency of 120 milliseconds. According to research published in Nature Electronics in March 2026, this device consists of a ring of small ultrasound transducers worn around the wrist, which monitor the movement of tendons and muscles in the forearm, capturing nuanced movements to create an accurate representation of finger and thumb positions. In trials involving eight participants, the system successfully monitored movements with around 120-millisecond latency, allowing it to replicate human hand movements on a robotic hand with what the researchers term near-natural responsiveness.
The study was led by Xuanhe Zhao, a mechanical engineering professor at MIT, along with co-authors Gengxi Lu, Xiaoyu Chen, Shucong Li, Bolei Deng, SeongHyeon Kim, Dian Li, Shu Wang, Runze Li, and Anantha Chandrakasan, MIT’s dean of engineering. The wristband’s accuracy was demonstrated as all eight participants performed the complete American Sign Language alphabet, accurately recognizing all 26 letters. The device is wireless and does not require cameras, gloves, or any attached sensors on the fingers.
Most current hand-tracking systems depend on cameras, which struggle when fingers are obstructed, or on instrumented gloves that limit natural movement and are impractical for long-term use. The MIT solution works by observing the body’s mechanics externally. When a finger moves, the associated tendons and muscles in the forearm adjust in unique patterns correlated to each movement.
The ultrasound transducers capture these shifts, and a machine learning model correlates them to the 22 degrees of freedom that describe hand positions, encompassing individual joint angles across all five fingers and the thumb’s opposition. The entire system is located on the wrist without any cameras or finger-mounted sensors.
The 120-millisecond latency is notable as it aligns with the responsiveness threshold perceived by humans during manual tasks. This was demonstrated by allowing participants to manipulate a dexterous robotic hand through the wristband, effectively completing grasping and manipulation tasks. The robotic hand followed the operator’s movements closely enough for the researchers to classify the interaction as suitable for teleoperation applications, where a human controls a remote robot in dangerous, sterile, or otherwise inaccessible environments.
The potential applications extend beyond laboratory teleoperation. Control of dexterous hands remains a significant challenge in humanoid robotics, with even well-resourced companies facing difficulties in fine manipulation. A wristband allowing human operators to impart their dexterity to a robotic hand in real-time could act as a bridge technology, enabling robots to handle complex manual tasks under human direction while advancements in autonomous capabilities continue.
Funding for the research was provided by the National Institutes of Health, the National Science Foundation, the Department of Defense, and the Singapore National Research Foundation, reflecting interest from both medical and defense sectors, where remote dexterous manipulation proves valuable in surgery, bomb disposal, and managing hazardous materials. The paper does not introduce a commercial product or announce a startup, presenting the device as a research prototype.
Notably, the paper in Nature Electronics was published in March 2026, making the research approximately three months old when it received wider media attention. The AP news story that shed light on this work acts as a delayed feature reporting on previously available findings since March.
As companies like Nvidia and Hyundai strive to advance robotics and implement humanoid machines in industrial settings, the means by which humans will interact with and control these machines is still largely unanswered. MIT’s wristband indicates that the interface may not be a typical screen or joystick but rather the operator's hand itself, interpreted through the skin.
The transition from research to product is contingent on addressing challenges not covered in the paper, such as manufacturing costs, durability, and whether the machine learning model can adapt to a diverse population of hand anatomies without needing individual calibration. The study with eight participants serves as a proof of concept rather than a clinical trial. Nonetheless, the demonstration of a wearable device enabling any human hand to serve as a robot controller without direct contact is a significant advancement towards making teleoperation viable beyond specialized laboratory settings.
Other articles
 Sony's 135-inch Crystal LED UNIFY is a boardroom screen that can be set up in just one hour.
Sony introduced the Crystal LED UNIFY, a 135-inch dvLED display designed for boardrooms that can be set up by two individuals in one hour. It is scheduled for release in early 2027.
Sony's 135-inch Crystal LED UNIFY is a boardroom screen that can be set up in just one hour.
Sony introduced the Crystal LED UNIFY, a 135-inch dvLED display designed for boardrooms that can be set up by two individuals in one hour. It is scheduled for release in early 2027.
 Forget RGB lighting; Aston Martin’s gaming PC is designed with a Monaco aesthetic.
Chillblast and Aston Martin’s exclusive gaming PCs infuse British Racing Green style, feature RTX 5090 performance, include leather details, and come with a premium collector's price tag.
Forget RGB lighting; Aston Martin’s gaming PC is designed with a Monaco aesthetic.
Chillblast and Aston Martin’s exclusive gaming PCs infuse British Racing Green style, feature RTX 5090 performance, include leather details, and come with a premium collector's price tag.
 Supermicro intends to secure $7 billion to meet $39 billion in orders for AI servers.
Super Micro Computer intends to generate $7 billion via equity offerings to purchase components for $39 billion in AI server orders from over 20 clients.
Supermicro intends to secure $7 billion to meet $39 billion in orders for AI servers.
Super Micro Computer intends to generate $7 billion via equity offerings to purchase components for $39 billion in AI server orders from over 20 clients.
 iPadOS 27: All the details about the new features coming to your iPad.
iPadOS 27 will be released this fall, featuring a brand-new Siri AI, enhanced photo tools, simplified Shortcuts, and a more organized Safari. Here’s all the information we have so far regarding the upcoming updates for your iPad.
FCC documents indicate that Valve's Steam Machine might be released prior to June 29.
FCC regulatory documents indicate that Valve's Steam Machine may be shipped prior to June 29, following a trend observed in the Steam Controller's filing.
iPadOS 27: All the details about the new features coming to your iPad.
iPadOS 27 will be released this fall, featuring a brand-new Siri AI, enhanced photo tools, simplified Shortcuts, and a more organized Safari. Here’s all the information we have so far regarding the upcoming updates for your iPad.
FCC documents indicate that Valve's Steam Machine might be released prior to June 29.
FCC regulatory documents indicate that Valve's Steam Machine may be shipped prior to June 29, following a trend observed in the Steam Controller's filing.
 The Munich-based startup ERC System has introduced Victor, a heavy-lift cargo eVTOL, at the ILA Berlin event.
ERC System introduced Victor, a hybrid-electric cargo eVTOL designed for uncrewed operation, featuring a payload capacity of 250kg and a range of 300km, during the ILA Berlin 2026 event, with plans for deliveries starting in 2028.
The Munich-based startup ERC System has introduced Victor, a heavy-lift cargo eVTOL, at the ILA Berlin event.
ERC System introduced Victor, a hybrid-electric cargo eVTOL designed for uncrewed operation, featuring a payload capacity of 250kg and a range of 300km, during the ILA Berlin 2026 event, with plans for deliveries starting in 2028.
The ultrasound wristband developed by MIT monitors the movements of each finger and enables real-time control of a robotic hand.
MIT engineers developed a wristband that uses ultrasound to monitor 22 degrees of hand movement with a latency of 120ms, allowing for real-time control of robotic hands and sign language.