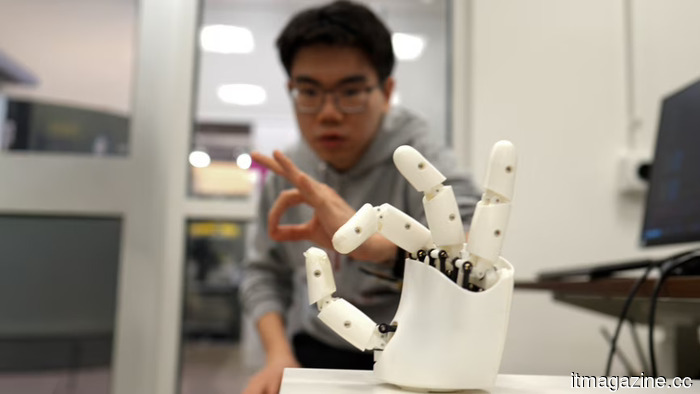
Il braccialetto ad ultrasuoni del MIT traccia ogni movimento delle dita e ti consente di controllare una mano robotica in tempo reale.
TL;DRMIT ha costruito un braccialetto ad ultrasuoni che traccia 22 gradi di movimento della mano e controlla una mano robotica in tempo reale con una latenza di 120 ms. Gli ingegneri del MIT hanno costruito un braccialetto ad ultrasuoni che può tracciare 22 gradi di libertà nella mano umana e utilizzare quei dati per controllare una mano robotica in tempo reale, secondo una ricerca pubblicata su Nature Electronics nel marzo 2026. Il dispositivo utilizza un anello di piccoli trasduttori ad ultrasuoni indossati attorno al polso per monitorare il movimento di tendini e muscoli nell'avambraccio, traducendo spostamenti sottili in un quadro completo della posizione delle dita e del pollice. In test con otto volontari, il sistema ha raggiunto un tracciamento continuo con una latenza di circa 120 millisecondi, abbastanza veloce da rispecchiare i movimenti della mano umana su un corrispondente robotico con quella che i ricercatori descrivono come una reattività quasi naturale. La ricerca è stata guidata da Xuanhe Zhao, professore di ingegneria meccanica al MIT, con coautori tra cui Gengxi Lu, Xiaoyu Chen, Shucong Li, Bolei Deng, SeongHyeon Kim, Dian Li, Shu Wang, Runze Li e Anantha Chandrakasan, decano dell'ingegneria del MIT. Il team ha dimostrato la precisione del braccialetto facendo eseguire a tutti e otto i partecipanti l'intero alfabeto della lingua dei segni americana, riconoscendo con successo tutte le 26 lettere. Il dispositivo funziona senza fili e non richiede telecamere, guanti o sensori attaccati alle dita stesse. I sistemi di tracciamento delle mani esistenti si basano tipicamente su telecamere, che falliscono quando le dita sono occluse, o guanti strumentati, che limitano il movimento naturale e sono impraticabili per un uso prolungato. L'approccio del MIT funziona leggendo la meccanica del corpo dall'esterno. Quando una dita si muove, i tendini e i muscoli nell'avambraccio si spostano in schemi specifici per ogni movimento. I trasduttori ad ultrasuoni rilevano quegli spostamenti e un modello di apprendimento automatico li mappa ai 22 gradi di libertà che definiscono la postura della mano, coprendo gli angoli delle articolazioni individuali su tutte e cinque le dita e l'opposizione del pollice. Non sono coinvolte telecamere o sensori montati sulle dita. L'intero sistema si trova sul polso. Il 💜 della tecnologia UE Le ultime novità dalla scena tecnologica dell'UE, una storia dal nostro saggio fondatore Boris e alcune opere d'arte AI discutibili. È gratuito, ogni settimana, nella tua casella di posta. Iscriviti ora! La cifra di latenza di 120 millisecondi è significativa perché rientra nell'intervallo che gli esseri umani percepiscono come reattivo nei compiti di controllo manuale. Il team ha dimostrato questo facendo controllare ai partecipanti una mano robotica abile attraverso il braccialetto, eseguendo compiti di presa e manipolazione. La mano robotica ha rispecchiato i movimenti dell'operatore abbastanza da far descrivere ai ricercatori l'interazione come adatta per applicazioni di teleoperazione, dove un operatore umano controlla un robot remoto per eseguire compiti in ambienti pericolosi, sterili o altrimenti inaccessibili. Le implicazioni si estendono ben oltre la teleoperazione in laboratorio. Il controllo abile della mano rimane uno dei problemi irrisolti più persistenti nella robotica umanoide, dove anche aziende ben finanziate che producono migliaia di unità faticano con la manipolazione fine. Un braccialetto che consente a un operatore umano di prestare la propria destrezza a una mano robotica in tempo reale potrebbe fungere da tecnologia ponte, consentendo ai robot di eseguire compiti manuali complessi sotto la guida umana mentre le capacità di manipolazione autonoma continuano a svilupparsi. La ricerca è stata finanziata dai National Institutes of Health, dalla National Science Foundation, dal Department of Defense e dalla Singapore National Research Foundation. Il mix di finanziamenti riflette l'interesse sia delle comunità mediche che di difesa, dove la manipolazione dexterous remota ha ovvie applicazioni in chirurgia, disinnesco di bombe e gestione di materiali pericolosi. L'articolo non descrive un prodotto commerciale né annuncia una startup, e il dispositivo così pubblicato è un prototipo di ricerca. Vale la pena notare che l'articolo di Nature Electronics è stato pubblicato nel marzo 2026, rendendo la ricerca sottostante di circa tre mesi al momento della copertura mediatica più ampia. La storia dell'AP wire che ha portato maggiore attenzione al lavoro è una caratteristica ritardata, non un rapporto su un nuovo annuncio. I risultati principali sono stati nel record pubblico da marzo. Mentre grandi aziende come Nvidia e Hyundai corrono per industrializzare la robotica e portare macchine umanoidi nei pavimenti delle fabbriche, la questione di come gli esseri umani interagiranno e controlleranno quelle macchine rimane in gran parte senza risposta. Il braccialetto del MIT suggerisce che l'interfaccia potrebbe non essere uno schermo o un joystick, ma la mano dell'operatore, letta attraverso la pelle. Se il dispositivo si sposterà da un laboratorio di ricerca a un prodotto dipende da sfide che l'articolo non affronta, tra cui costo di produzione, durata e se il modello di apprendimento automatico si generalizza su una vasta popolazione di anatomie della mano senza calibrazione per utente. Lo studio con otto volontari è una prova di concetto, non una sperimentazione clinica. Ma come dimostrazione di ciò che è fisicamente possibile, un indossabile che trasforma qualsiasi mano umana in un controller robotico senza toccare la mano stessa è un passo significativo verso la realizzazione della teleoperazione pratica al di fuori di laboratori specializzati.
Other articles
 Rem3dy Health raccoglie 14 milioni di sterline con una valutazione di 84 milioni di sterline per portare le vitamine personalizzate stampate in 3D a livello globale.
Rem3dy Health di Birmingham ha raccolto 14 milioni di sterline da Suntory, Apollo Hospitals ed Estrella Galicia per espandere il suo marchio di nutrizione personalizzata stampato in 3D, Nourished.
Rem3dy Health raccoglie 14 milioni di sterline con una valutazione di 84 milioni di sterline per portare le vitamine personalizzate stampate in 3D a livello globale.
Rem3dy Health di Birmingham ha raccolto 14 milioni di sterline da Suntory, Apollo Hospitals ed Estrella Galicia per espandere il suo marchio di nutrizione personalizzata stampato in 3D, Nourished.
 Anthropic rilascia Claude Fable 5, il suo primo modello di classe Mythos per il pubblico
Anthropic ha lanciato Claude Fable 5 martedì, un modello di classe Mythos con misure di sicurezza che bloccano le domande sulla cybersicurezza e sulla biologia, al prezzo di 10 dollari per milione di token di input.
Anthropic rilascia Claude Fable 5, il suo primo modello di classe Mythos per il pubblico
Anthropic ha lanciato Claude Fable 5 martedì, un modello di classe Mythos con misure di sicurezza che bloccano le domande sulla cybersicurezza e sulla biologia, al prezzo di 10 dollari per milione di token di input.
 Due gruppi APT russi stanno sfruttando una vulnerabilità di WinRAR corretta quasi un anno fa per colpire l'Ucraina.
Gamaredon e SHADOW-EARTH-066 stanno sfruttando CVE-2025-8088 in WinRAR per rubare credenziali e documenti da obiettivi ucraini, quasi un anno dopo una patch.
Due gruppi APT russi stanno sfruttando una vulnerabilità di WinRAR corretta quasi un anno fa per colpire l'Ucraina.
Gamaredon e SHADOW-EARTH-066 stanno sfruttando CVE-2025-8088 in WinRAR per rubare credenziali e documenti da obiettivi ucraini, quasi un anno dopo una patch.
 Il CEO di Vinted afferma che gli Stati Uniti sono un
Il CEO di Vinted, Adam Jay, afferma che il consumo di seconda mano è "qui per restare" mentre il marketplace lituano da 8 miliardi di euro si espande negli Stati Uniti dopo aver registrato 1,1 miliardi di euro di fatturato nel 2025.
Il CEO di Vinted afferma che gli Stati Uniti sono un
Il CEO di Vinted, Adam Jay, afferma che il consumo di seconda mano è "qui per restare" mentre il marketplace lituano da 8 miliardi di euro si espande negli Stati Uniti dopo aver registrato 1,1 miliardi di euro di fatturato nel 2025.
 Il Crystal LED UNIFY da 135 pollici di Sony è un display per sale riunioni che puoi installare in un'ora.
Sony ha svelato il Crystal LED UNIFY, un display dvLED da 135 pollici per sale riunioni che due persone possono installare in un'ora. Sarà disponibile all'inizio del 2027.
Il Crystal LED UNIFY da 135 pollici di Sony è un display per sale riunioni che puoi installare in un'ora.
Sony ha svelato il Crystal LED UNIFY, un display dvLED da 135 pollici per sale riunioni che due persone possono installare in un'ora. Sarà disponibile all'inizio del 2027.
 Rivian inizia le consegne dell'R2 mentre scommette che un mercato EV statunitense in contrazione sia un'opportunità
Rivian ha iniziato a consegnare SUV R2 ai clienti martedì, puntando a 20.000-25.000 consegne entro la fine dell'anno mentre ci sono meno nuovi veicoli elettrici che competono in un mercato statunitense ostile.
Rivian inizia le consegne dell'R2 mentre scommette che un mercato EV statunitense in contrazione sia un'opportunità
Rivian ha iniziato a consegnare SUV R2 ai clienti martedì, puntando a 20.000-25.000 consegne entro la fine dell'anno mentre ci sono meno nuovi veicoli elettrici che competono in un mercato statunitense ostile.
Il braccialetto ad ultrasuoni del MIT traccia ogni movimento delle dita e ti consente di controllare una mano robotica in tempo reale.
Gli ingegneri del MIT hanno costruito un braccialetto ad ultrasuoni che traccia 22 gradi di libertà della mano con una latenza di 120 ms, consentendo il controllo in tempo reale di mani robotiche e del linguaggio dei segni.