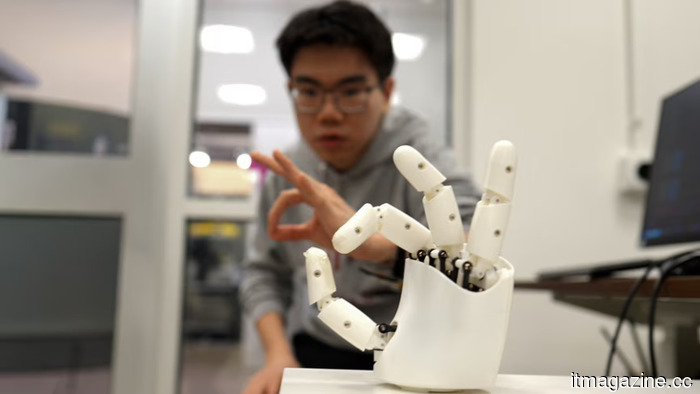
MIT's ultrasound wristband monitors all finger movements and enables you to control a robotic hand instantly.
MIT has developed an ultrasound wristband that monitors 22 degrees of hand motion and can control a robotic hand in real-time with a latency of 120 milliseconds. This device employs a ring of small ultrasound transducers worn around the wrist to track the movements of tendons and muscles in the forearm, converting subtle changes into a comprehensive understanding of the position of fingers and thumb. In trials involving eight participants, the system maintained continuous tracking with roughly 120-millisecond latency, which is quick enough to replicate a human hand's actions on a robotic hand, exhibiting what the researchers call near-natural responsiveness.
The research was spearheaded by Xuanhe Zhao, a mechanical engineering professor at MIT, alongside co-authors Gengxi Lu, Xiaoyu Chen, Shucong Li, Bolei Deng, SeongHyeon Kim, Dian Li, Shu Wang, Runze Li, and Anantha Chandrakasan, the dean of engineering at MIT. The team showcased the wristband's accuracy by having all participants sign the complete American Sign Language alphabet, successfully recognizing all 26 letters. This device operates wirelessly, eliminating the need for cameras, gloves, or any sensors on the fingers themselves.
Current hand-tracking systems generally depend on cameras, which can fail if fingers are obscured, or on gloves that hinder natural motion and are not practical for prolonged use. The MIT solution captures the body's mechanics externally. When a finger moves, the forearm's tendons and muscles shift according to specific movement patterns.
The ultrasound transducers identify these shifts, and a machine learning model correlates them to the 22 degrees of freedom defining hand posture, encompassing the angles of individual joints across all five fingers and the opposing thumb. The entire system is located on the wrist without using cameras or finger-mounted sensors.
The significance of the 120-millisecond latency lies in its alignment with the range that humans perceive as responsive for manual tasks. The team illustrated this by enabling participants to operate a responsive robotic hand using the wristband for tasks such as grasping and manipulation. The robotic hand closely mirrored the user’s movements, making it suitable for teleoperation scenarios where a human controls a remote robot to perform tasks in hazardous, sterile, or inaccessible environments.
The potential applications extend far beyond the lab. Efficient hand control remains a challenging problem in humanoid robotics; even well-funded businesses that produce numerous units face difficulties with fine manipulation. A wristband that allows a human operator to impart their dexterity to a robotic hand in real-time could act as a crucial technology, facilitating robots to carry out intricate manual tasks under human oversight while further developing autonomous manipulation abilities.
The research received funding from institutions such as the National Institutes of Health, the National Science Foundation, the Department of Defense, and the Singapore National Research Foundation, reflecting interest from both medical and defense sectors, where remote precise manipulation is invaluable in fields like surgery, bomb disposal, and managing hazardous materials. The paper does not present a commercial product or introduce a startup, as the current device is a research prototype.
It is important to note that the Nature Electronics article was published in March 2026, indicating that the research was roughly three months old at the time of its broader media coverage. The Associated Press story that highlighted this work is a delayed feature rather than a report of a new announcement, with the key findings available to the public since March.
As major corporations like Nvidia and Hyundai strive to advance robotics and integrate humanoid machines into factories, the way humans will engage with and control these machines remains largely uncertain. MIT's wristband suggests that the interface may be the operator's own hand, interpreted through the skin rather than a screen or joystick.
Whether this device transitions from a research environment to a product will depend on issues not addressed in the paper, such as manufacturing costs, durability, and whether the machine learning model effectively adapts to a wide range of hand anatomies without needing individual calibration. The study with eight participants serves as a proof of concept, not a clinical trial. Nevertheless, as a demonstration of physical possibilities, this wearable technology that transforms any human hand into a robotic controller without direct contact is a significant advancement towards making teleoperation feasible beyond specialized lab settings.
Other articles
 Rivian starts R2 deliveries, viewing the contracting US EV market as a chance for growth.
On Tuesday, Rivian began delivering R2 SUVs to customers, aiming for 20,000 to 25,000 deliveries by the end of the year amidst a challenging US market with fewer new EV competitors.
Rivian starts R2 deliveries, viewing the contracting US EV market as a chance for growth.
On Tuesday, Rivian began delivering R2 SUVs to customers, aiming for 20,000 to 25,000 deliveries by the end of the year amidst a challenging US market with fewer new EV competitors.
 The CEO of Vinted states that the US is a
Vinted's CEO Adam Jay states that secondhand shopping is "here to stay," as the €8 billion Lithuanian marketplace expands into the US following a reported revenue of €1.1 billion in 2025.
The CEO of Vinted states that the US is a
Vinted's CEO Adam Jay states that secondhand shopping is "here to stay," as the €8 billion Lithuanian marketplace expands into the US following a reported revenue of €1.1 billion in 2025.
 Forget about RGB lighting; Aston Martin’s gaming PC is styled for Monaco.
Chillblast and Aston Martin’s exclusive gaming PCs add a touch of British Racing Green, feature RTX 5090 performance, include leather details, and come at collector-level prices for your workspace.
Forget about RGB lighting; Aston Martin’s gaming PC is styled for Monaco.
Chillblast and Aston Martin’s exclusive gaming PCs add a touch of British Racing Green, feature RTX 5090 performance, include leather details, and come at collector-level prices for your workspace.
 Rem3dy Health secures £14 million in funding, achieving a valuation of £84 million, with plans to expand its 3D-printed personalized vitamins internationally.
Birmingham's Rem3dy Health secured £14M from Suntory, Apollo Hospitals, and Estrella Galicia to grow its 3D-printed personalized nutrition brand, Nourished.
Rem3dy Health secures £14 million in funding, achieving a valuation of £84 million, with plans to expand its 3D-printed personalized vitamins internationally.
Birmingham's Rem3dy Health secured £14M from Suntory, Apollo Hospitals, and Estrella Galicia to grow its 3D-printed personalized nutrition brand, Nourished.
 iPadOS 27: All the details about the new features coming to your iPad.
iPadOS 27 will be released this fall, featuring a brand-new Siri AI, enhanced photo tools, simplified Shortcuts, and a more organized Safari. Here’s all the information we have so far regarding the upcoming updates for your iPad.
iPadOS 27: All the details about the new features coming to your iPad.
iPadOS 27 will be released this fall, featuring a brand-new Siri AI, enhanced photo tools, simplified Shortcuts, and a more organized Safari. Here’s all the information we have so far regarding the upcoming updates for your iPad.
 Two Russian APT groups are taking advantage of a WinRAR vulnerability that was fixed nearly a year ago to target Ukraine.
Gamaredon and SHADOW-EARTH-066 are taking advantage of CVE-2025-8088 in WinRAR to obtain credentials and documents from Ukrainian targets, almost a year following the release of a patch.
Two Russian APT groups are taking advantage of a WinRAR vulnerability that was fixed nearly a year ago to target Ukraine.
Gamaredon and SHADOW-EARTH-066 are taking advantage of CVE-2025-8088 in WinRAR to obtain credentials and documents from Ukrainian targets, almost a year following the release of a patch.
MIT's ultrasound wristband monitors all finger movements and enables you to control a robotic hand instantly.
Engineers at MIT have developed an ultrasound wristband that monitors 22 degrees of hand movement with a latency of 120 milliseconds, allowing for real-time control of robotic hands and sign language.