
Investigating physical AI: Linkerbot is focused on equipping robots with human-like hands to operate in the real world.
If large language models serve as the brains of machines, then agile robotic hands are becoming their bodies. As AI transitions from the digital realm to the physical world, Linkerbot is opting for a more challenging and fundamental approach: constructing robotic hands that can manage real-world tasks with human-like precision.
“The next wave of AI will be physical AI,” stated the Linkerbot team, quoting NVIDIA CEO Jensen Huang. “For us, the main obstacle isn't solely computational power (brain). It’s the speed at which the hardware (body) can evolve.” They further emphasized that true embodied intelligence can only emerge once robots learn to see, touch, move, and adapt autonomously.
Transitioning from creating dexterous hands to enabling embodied intelligence
In recent years, Linkerbot has concentrated on developing highly dexterous robotic hands with a high degree of freedom (DOF), progressively assembling a comprehensive system that integrates hardware, algorithms, and data. The firm is now transitioning from mere hardware production to a new phase of intelligent advancement.
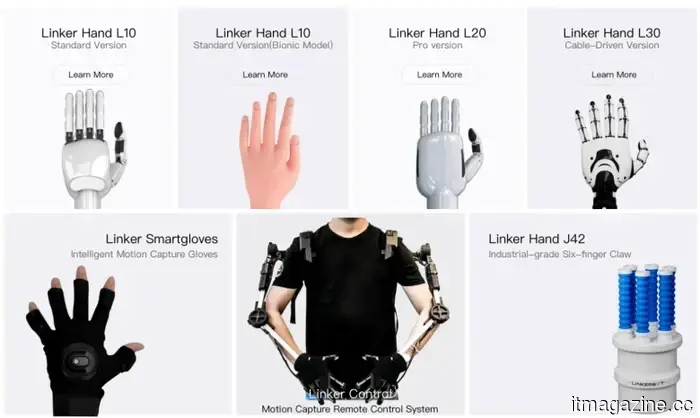
The company has unveiled a PEEK-based (Polyether Ether Ketone) reducer, substituting traditional metal components to enhance the robots' lightness and efficiency. Additionally, they are exploring various technical routes—including tendon-driven, linkage-based, and direct-drive approaches—while creating AI-integrated dexterous hands with built-in perception.
On the software front, Linkerbot is developing a model of the physical world, having launched its expansive Linker Creation Model along with Linker OS and a real-world reinforcement learning framework, with the aim of facilitating a continuous flow from data collection to model training. “Our ambition goes beyond simply creating robotic hands; we strive to construct the foundational infrastructure for embodied intelligence,” the team remarked.
Three primary scenarios propelling demand in the real world
For practical application, Linkerbot is concentrating on three main areas: precision manufacturing, healthcare and life sciences, and domestic services.
In industrial settings, its dexterous robotic hands are already being utilized for micro-component assembly in the automotive and consumer electronics industries. In agriculture, the company is collaborating with local research institutions to develop breeding robots and investigate dexterous manipulation in advanced farming techniques. In eldercare and rehabilitation, Linkerbot is designing dexterous robotic hands to assist with caregiving and daily chores—from folding laundry to serving coffee, akin to how a family member would.
“Our aim is to liberate individuals from hazardous, physically taxing, and repetitive jobs, allowing them to focus on more creative endeavors,” the team noted.
Industrial-level reliability remains the key challenge
According to the team, the greatest obstacle in applying their technology in real-world scenarios, compared to laboratory demonstrations, is gaining trust within the physical realm. “In a lab, a bug can simply be addressed with a software update,” they explained. “However, in practical situations, a bug could lead to physical harm or safety hazards.” This is why dexterous robotic hands have often been regarded as delicate and unreliable.
With this understanding, Linkerbot is striving to balance durability and cost. Its Linker Hand series has withstood rigorous evaluations, from impact tests to drop tests and has contributed to the establishment of national standards. On the global ManipulationNet benchmark, Linkerbot has successfully carried out remote Peg-in-Hole manipulation validation, which is essential for assessing fine motor control.
The firm has also rolled out a modular teleoperation system named Open TeleDex. Built around the TripleAny concept—any hand, any arm, any device—it simplifies and enhances system integration for customers.
Connecting academic research and industrial implementation
Internationally, Linkerbot primarily targets research communities in North America and Europe, with its products being utilized in university laboratories, including those at Stanford and Cambridge. Simultaneously, the company is focusing on the healthcare and eldercare demands of aging populations in countries like Japan and South Korea.
“Technology transcends borders, yet culture remains significant,” remarked the team. Many overseas developers prioritize open-source tools and interoperability, which is why Open TeleDex is designed with an open architecture. This enables developers to operate robotic hands with familiar devices such as VR headsets and exoskeletons, facilitating experimentation, construction, and collaboration globally.
The Linkerbot team noted that their clients typically approach them with two distinct needs: one group aims to push the boundaries of physical dexterity for research and exploration, while the other focuses on creating dependable, stable systems suited for real industrial applications and scalable for mass production.
Achieving scale is the pivotal moment for embodied intelligence
In terms of manufacturing, Linkerbot can currently produce more than 1,000 high-dexterity robotic hands monthly and is targeting an increase to between 50,000 and 100,000 units annually by 2026. In December 2025, Linkerbot completed its Series A++ funding round, which was led by Sequoia China and CCV (Creation Partners Capital).
The Linkerbot

Other articles
 AI-driven demand indicates a prolonged semiconductor upcycle extending into 2026 and beyond.
During the UBS Greater China Conference 2026 in Shanghai on Wednesday, Jimmy Yu, a Semiconductor Analyst for China at UBS Securities, presented his
AI-driven demand indicates a prolonged semiconductor upcycle extending into 2026 and beyond.
During the UBS Greater China Conference 2026 in Shanghai on Wednesday, Jimmy Yu, a Semiconductor Analyst for China at UBS Securities, presented his
 From laboratory to living space: how CSOT transforms research into dependable displays.
With the growing prevalence of consumer electronics and smart devices, the significance of display technology in electronic devices is rising.
From laboratory to living space: how CSOT transforms research into dependable displays.
With the growing prevalence of consumer electronics and smart devices, the significance of display technology in electronic devices is rising.
 How Flippa Is Eliminating Language Barriers in International Deal-Making
Flippa is breaking down language obstacles in global M&A through its AI-driven multi-language Deal Room, assisting buyers and sellers in finalizing cross-border digital business transactions.
How Flippa Is Eliminating Language Barriers in International Deal-Making
Flippa is breaking down language obstacles in global M&A through its AI-driven multi-language Deal Room, assisting buyers and sellers in finalizing cross-border digital business transactions.
 From the laboratory to the living room: how CSOT transforms research into dependable displays.
With the rising prevalence of consumer electronics and smart devices, display technology is taking on a more significant role in electronic devices. Chinese
From the laboratory to the living room: how CSOT transforms research into dependable displays.
With the rising prevalence of consumer electronics and smart devices, display technology is taking on a more significant role in electronic devices. Chinese
 How Flippa Is Breaking Down Language Barriers in Global Deal-Making
Flippa is eliminating language obstacles in global mergers and acquisitions with its AI-driven multilingual Deal Room, assisting buyers and sellers in finalizing cross-border digital business transactions.
How Flippa Is Breaking Down Language Barriers in Global Deal-Making
Flippa is eliminating language obstacles in global mergers and acquisitions with its AI-driven multilingual Deal Room, assisting buyers and sellers in finalizing cross-border digital business transactions.
 How Flippa is Eliminating Language Barriers in Global Transactions
Flippa is eliminating language obstacles in global M&A through its AI-driven multi-language Deal Room, assisting buyers and sellers in finalizing cross-border digital business transactions.
How Flippa is Eliminating Language Barriers in Global Transactions
Flippa is eliminating language obstacles in global M&A through its AI-driven multi-language Deal Room, assisting buyers and sellers in finalizing cross-border digital business transactions.
Investigating physical AI: Linkerbot is focused on equipping robots with human-like hands to operate in the real world.
If large language models act as the brains of machines, then agile robotic hands are evolving into their physical forms. As AI transitions from the digital realm into