
Explorando la IA física: Linkerbot trabaja en dar a los robots manos similares a las humanas para actuar en el mundo real.
Si los modelos de lenguaje grandes son los cerebros de las máquinas, entonces las manos robóticas hábiles se están convirtiendo en sus cuerpos. A medida que la IA sale del mundo digital y entra en el físico, Linkerbot ha elegido un camino más difícil y fundamental: construir manos robóticas capaces de manejar el mundo real con precisión similar a la humana.
“El CEO de NVIDIA, Jensen Huang, dijo una vez que la próxima ola de IA sería la IA física”, dijo el equipo de Linkerbot. “Para nosotros, el verdadero cuello de botella no es solo la potencia de cálculo (cerebro). Es qué tan rápido puede alcanzar el hardware (cuerpo)”. Solo cuando los robots realmente aprendan a ver, tocar, moverse y adaptarse por sí mismos, la inteligencia incorporada comenzará a tomar forma, agregó el equipo.
Desde la construcción de manos hábiles hasta el impulso de la inteligencia incorporada
En los últimos años, Linkerbot se ha centrado en desarrollar manos robóticas hábiles de alto DOF (Grados de Libertad), construyendo gradualmente un sistema de pila completa que combina hardware, algoritmos y datos. Ahora, la empresa está avanzando más allá de la fabricación de hardware puro hacia una nueva etapa de evolución inteligente.
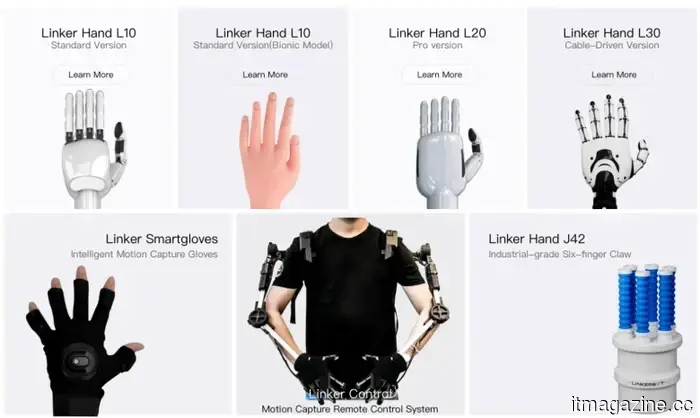
Linkerbot ha introducido un reductor basado en PEEK (Polieter Éter Cetona), reemplazando estructuras metálicas tradicionales para hacer que los robots sean más ligeros y eficientes. La empresa también explora múltiples caminos técnicos: impulsados por tendones, basados en enlaces y de accionamiento directo, mientras desarrolla manos hábiles impulsadas por IA con percepción integrada.
En el lado del software, Linkerbot está construyendo un modelo del mundo físico y ha lanzado su modelo a gran escala, el Modelo de Creación Linker, junto con Linker OS y un marco de aprendizaje por refuerzo en el mundo real, con el objetivo de cerrar el ciclo desde la recolección de datos hasta el entrenamiento del modelo.
“Nuestro objetivo no es solo construir manos robóticas, sino crear la infraestructura fundamental para la inteligencia incorporada”, dijo el equipo.
Tres escenarios clave que impulsan la demanda en el mundo real
Para el despliegue en el mundo real, Linkerbot se está centrando actualmente en tres áreas de aplicación principales: fabricación de precisión, atención médica y ciencias de la vida, y servicios domésticos.
En las fábricas, sus manos robóticas hábiles ya se están utilizando para el ensamblaje de microcomponentes en los sectores automotriz y de electrónica de consumo. En agricultura, la empresa está trabajando con instituciones de investigación nacionales para desarrollar robots de cría y explorar el uso de la manipulación hábil en la agricultura de alta tecnología. En el cuidado de ancianos y la rehabilitación, se están desarrollando manos robóticas hábiles para apoyar el cuidado y las tareas diarias, desde doblar ropa hasta servir café, muy parecido a lo que haría un miembro de la familia.
“Nuestro objetivo es liberar a las personas de trabajos peligrosos, físicamente exigentes y repetitivos, para que puedan centrarse en tareas más creativas”, dijo el equipo.
La fiabilidad de grado industrial es el mayor obstáculo
En comparación con las demostraciones de laboratorio, el mayor desafío en el despliegue en el mundo real es ganar confianza en el mundo físico, según el equipo. “En el laboratorio, un error es solo un parche de software”, dijo el equipo. “Pero en escenarios de la vida real, un error puede significar daño físico o incluso riesgos de seguridad”. Eso, añadieron, es por qué las manos robóticas hábiles han sido vistas durante mucho tiempo como frágiles e ineficaces.
Con esto en mente, Linkerbot busca encontrar un equilibrio entre durabilidad y costo. Su serie Linker Hand ha sobrevivido a pruebas rigurosas, desde choques hasta pruebas de caída, y ha estado involucrada en la creación de estándares nacionales. En el benchmark global ManipulationNet, Linkerbot ha completado la validación de manipulación remota Peg-in-Hole, una prueba clave para el control motor fino.
Mientras tanto, la empresa ha lanzado un sistema de teleoperación modular llamado Open TeleDex. Construido en torno al concepto TripleAny — cualquier mano, cualquier brazo, cualquier dispositivo — hace que la integración del sistema sea mucho más simple y flexible para los clientes.
Uniendo la investigación académica y el despliegue industrial
En el extranjero, Linkerbot se centra principalmente en comunidades de investigación en América del Norte y Europa, y sus productos se están utilizando en laboratorios de universidades como Stanford y Cambridge. Al mismo tiempo, la empresa también está prestando atención a las necesidades de atención médica y cuidado de ancianos en sociedades envejecidas como Japón y Corea del Sur.
“La tecnología no conoce fronteras, pero la cultura sigue importando”, dijo el equipo. Muchos desarrolladores en el extranjero se preocupan profundamente por las herramientas de código abierto y la interoperabilidad, por lo que Open TeleDex se construye con una arquitectura abierta. Esto permite a los desarrolladores controlar manos robóticas utilizando dispositivos familiares como auriculares de realidad virtual y exoesqueletos, facilitando la experimentación, construcción y colaboración con otros en todo el mundo.
El equipo de Linkerbot dijo que sus clientes generalmente se acercan a ellos con dos tipos de necesidades muy diferentes. Un grupo se centra en llevar al límite la destreza del mundo físico, principalmente con fines de investigación y exploración. El otro está más preocupado por construir sistemas fiables y estables que puedan ser desplegados en escenarios industriales reales y escalados para producción en masa.
Escalar es el verdadero punto de inflexión para la inteligencia incorporada
Cuando se trata de fabricación, Linkerbot ahora puede producir más de 1,000 manos robóticas de alta destreza por mes, y tiene como objetivo escalar eso a 50,000–100,000 unidades por año para 2026. En diciembre de 2025, Linkerbot cerró su ronda de financiación Serie A++ liderada por Sequoia China y CCV (Creation Partners Capital).
El equipo de Linkerbot cree que la escala es donde comienza el verdadero impacto. “Cuando entregamos 100,000 manos hábiles, eso significa que 100,000 trabajos peligrosos, agotadores o repetitivos pueden ser asumidos por robots”, dijo el equipo. “Ese es nuestro compromiso a largo plazo de utilizar la tecnología para el bien”.
En un momento en que la inteligencia incorporada aún está en sus primeras etapas, Linkerbot está apostando a que manos más parecidas a las humanas, producidas a escala industrial real, pueden sentar las bases para el futuro de la IA física.

Otros artículos
 Dentro de la apuesta de Makera por los creadores globales a medida que el poder de las CNC de escritorio encuentra su momento
En los últimos años, a medida que la tecnología de fabricación digital se ha vuelto más accesible, las herramientas de nivel de escritorio para creadores y pequeñas empresas han comenzado a
Dentro de la apuesta de Makera por los creadores globales a medida que el poder de las CNC de escritorio encuentra su momento
En los últimos años, a medida que la tecnología de fabricación digital se ha vuelto más accesible, las herramientas de nivel de escritorio para creadores y pequeñas empresas han comenzado a
 Cómo Flippa está eliminando la barrera del idioma en las negociaciones globales
Flippa está eliminando las barreras lingüísticas en las fusiones y adquisiciones globales con su Sala de Negocios multilingüe impulsada por IA, ayudando a compradores y vendedores a cerrar acuerdos comerciales digitales transfronterizos.
Cómo Flippa está eliminando la barrera del idioma en las negociaciones globales
Flippa está eliminando las barreras lingüísticas en las fusiones y adquisiciones globales con su Sala de Negocios multilingüe impulsada por IA, ayudando a compradores y vendedores a cerrar acuerdos comerciales digitales transfronterizos.
 De laboratorio a sala de estar: cómo CSOT convierte la investigación en pantallas confiables
A medida que la electrónica de consumo y los dispositivos inteligentes se vuelven más comunes, la tecnología de visualización desempeña un papel cada vez más importante en los dispositivos electrónicos.
De laboratorio a sala de estar: cómo CSOT convierte la investigación en pantallas confiables
A medida que la electrónica de consumo y los dispositivos inteligentes se vuelven más comunes, la tecnología de visualización desempeña un papel cada vez más importante en los dispositivos electrónicos.
 De laboratorio a sala de estar: cómo CSOT convierte la investigación en pantallas fiables
A medida que la electrónica de consumo y los dispositivos inteligentes se vuelven más comunes, la tecnología de visualización desempeña un papel cada vez más importante en los dispositivos electrónicos.
De laboratorio a sala de estar: cómo CSOT convierte la investigación en pantallas fiables
A medida que la electrónica de consumo y los dispositivos inteligentes se vuelven más comunes, la tecnología de visualización desempeña un papel cada vez más importante en los dispositivos electrónicos.
 Dentro de la apuesta de Makera por los creadores globales a medida que el poder de las CNC de escritorio encuentra su momento
En los últimos años, a medida que la tecnología de fabricación digital se ha vuelto más accesible, las herramientas de nivel de escritorio para creadores y pequeñas empresas han comenzado a
Dentro de la apuesta de Makera por los creadores globales a medida que el poder de las CNC de escritorio encuentra su momento
En los últimos años, a medida que la tecnología de fabricación digital se ha vuelto más accesible, las herramientas de nivel de escritorio para creadores y pequeñas empresas han comenzado a
 Las señales de demanda impulsadas por la IA prolongan el ciclo alcista de los semiconductores hasta 2026 y más allá.
En la Conferencia UBS de Gran China 2026 celebrada en Shanghái el miércoles, Jimmy Yu, Analista de Semiconductores de Tecnología en China de UBS Securities, compartió su
Las señales de demanda impulsadas por la IA prolongan el ciclo alcista de los semiconductores hasta 2026 y más allá.
En la Conferencia UBS de Gran China 2026 celebrada en Shanghái el miércoles, Jimmy Yu, Analista de Semiconductores de Tecnología en China de UBS Securities, compartió su
Explorando la IA física: Linkerbot trabaja en dar a los robots manos similares a las humanas para actuar en el mundo real.
Si los modelos de lenguaje grandes son los cerebros de las máquinas, entonces las manos robóticas hábiles se están convirtiendo en sus cuerpos. A medida que la IA sale del mundo digital y entra en